A set of problem parameters. More...
#include <problem_param.h>
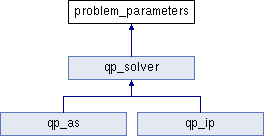
Inheritance diagram for problem_parameters:
Public Member Functions | |
| problem_parameters (const int, const double, const double, const double, const double) | |
| ~problem_parameters () | |
| void | set_state_parameters (const double *, const double *, const double, const double *) |
| Initializes quadratic problem. | |
Public Attributes | |
| int | N |
| state_parameters * | spar |
| bool | variable_th_on |
| double | i2Q [3] |
| double | i2P |
Detailed Description
A set of problem parameters.
Definition at line 47 of file problem_param.h.
Constructor & Destructor Documentation
| problem_parameters::problem_parameters | ( | const int | N_, |
| const double | Alpha, | ||
| const double | Beta, | ||
| const double | Gamma, | ||
| const double | regularization | ||
| ) |
Definition at line 21 of file problem_param.cpp.
Definition at line 41 of file problem_param.cpp.
Member Function Documentation
| void problem_parameters::set_state_parameters | ( | const double * | T_, |
| const double * | h_, | ||
| const double | h_initial, | ||
| const double * | angle | ||
| ) |
Initializes quadratic problem.
- Parameters:
-
[in] T_ Sampling time (for the moment it is assumed to be constant) [sec.] [in] h_ Height of the Center of Mass divided by gravity [in] h_initial current h [in] angle Rotation angle for each state in the preview window
Definition at line 55 of file problem_param.cpp.
Member Data Documentation
| double problem_parameters::i2P |
Control related penalty.
Definition at line 67 of file problem_param.h.
| double problem_parameters::i2Q[3] |
State related penalty.
Definition at line 62 of file problem_param.h.
Number of iterations in a preview window.
Definition at line 57 of file problem_param.h.
Definition at line 70 of file problem_param.h.
Definition at line 72 of file problem_param.h.
The documentation for this class was generated from the following files:
- solver/problem_param.h
- solver/problem_param.cpp
