A sparse MPC solver for walking motion generation (old version).
Main Page
Related Pages
Modules
Namespaces
Classes
Files
Derivation of the matrix of equality constraints
Generated by
1.8.0

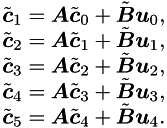
![$ \mbm{E}_c = \left[ \begin{array}{ccccc} -\mbm{I} & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{A} & -\mbm{I} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{A} & -\mbm{I} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{A} & -\mbm{I} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{A} & -\mbm{I} \\ \end{array} \right], \quad \tilde{\mbm{E}}_u = \left[ \begin{array}{ccccc} \tilde{\mbm{B}} & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \tilde{\mbm{B}} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \tilde{\mbm{B}} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{B}} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{B}}\\ \end{array} \right], \quad $](form_32.png)
![$ \mbm{e} = \left[ \begin{array}{c} -\mbm{A}\tilde{\mbm{c}}_0 \\ \mbm{0} \\ \mbm{0} \\ \vdots \\ \mbm{0} \end{array} \right]. $](form_33.png)
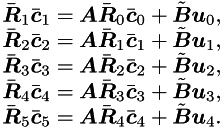
![$ \bar{\mbm{E}}_c = \left[ \begin{array}{ccccc} -\bar{\mbm{R}}_1 & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{A}\bar{\mbm{R}}_1 & -\bar{\mbm{R}}_2 & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{A}\bar{\mbm{R}}_2 & -\bar{\mbm{R}}_3 & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{A}\bar{\mbm{R}}_3 & -\bar{\mbm{R}}_4 & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{A}\bar{\mbm{R}}_4 & -\bar{\mbm{R}}_5 \\ \end{array} \right], \quad \tilde{\mbm{E}}_u = \left[ \begin{array}{ccccc} \tilde{\mbm{B}} & \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \tilde{\mbm{B}} & \mbm{0} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \tilde{\mbm{B}} & \mbm{0} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{B}} & \mbm{0} \\ \mbm{0} & \mbm{0} & \mbm{0} & \mbm{0} & \tilde{\mbm{B}}\\ \end{array} \right], \quad $](form_35.png)
![$ \mbm{e} = \left[ \begin{array}{c} -\mbm{A}\bar{\mbm{R}}_0\bar{\mbm{c}}_0 \\ \mbm{0} \\ \mbm{0} \\ \vdots \\ \mbm{0} \end{array} \right]. $](form_36.png)
 1.8.0
1.8.0